Labs
There will be 13 labs in total. This page contains all the lab writeups, images, and embedded videos that walk through what was done in each lab.
Lab 1: The Artemis Board
The Artemis Board In this class, we’ll be using the Artemis board, specifically the SparkFun Red...
Lab 2: Bluetooth Communication
In this lab, we’re going to establish communication between our computer and the Artemis board ...
Lab 3: ToF & IMU
In this lab, we equipped the robot with sensors (specifically the Time-of-Flight (ToF) and Inte...
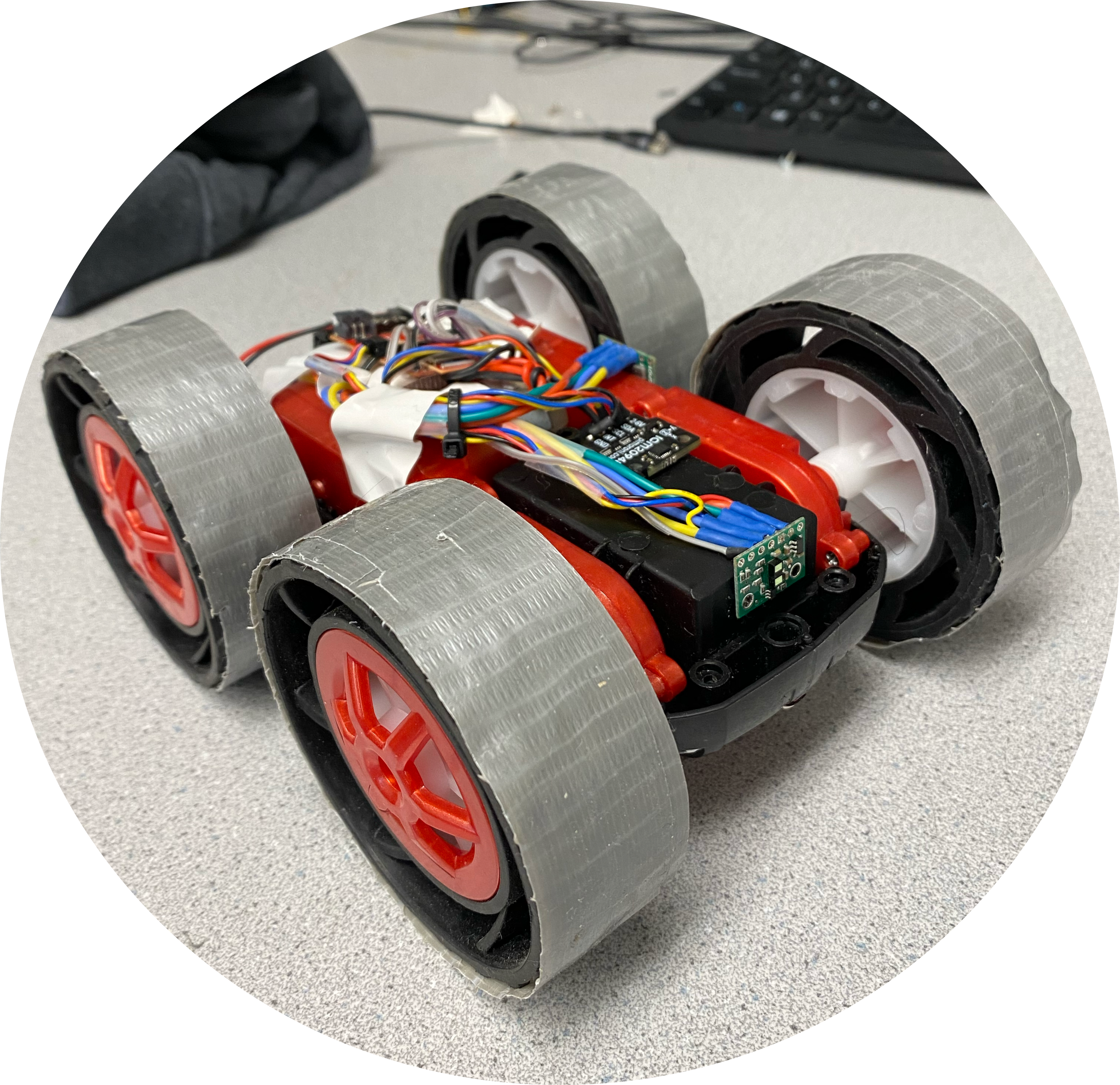
Lab 4: Characterize Your Car
In this lab, we characterized our car to leverage the remote control and familiarize ourselves wi...
Lab 5: Open Loop Control
In this lab, we changed from manual to open loop control of the car. At the end of this lab, ou...
Lab 6: PID Speed Control
In this lab, we used what we learned from lecture about PID control and implemented it to our c...
Lab 7: Kalman Filter
In this lab, we implemented a Kalman Filter to combat the slow sampling rate of the sensors, as...
Lab 8: Stunts!
In this lab, we utilized the past few labs to finally implement stunts with our robot car. Lab...
Lab 9: Mapping
In this lab, we attempt to create a mapping of a room in the lab, and use this map in later loc...
Lab 10: Simulator
In this lab, set up and used our simulator environment. One of the reasons why we might use a s...
Lab 11: Localization (Sim)
In this lab, we implemented grid localization using Bayes filter. We were tasked to simulate th...
Lab 12: Localization (Real)
In this lab, we were given a fully-functional and optimized Bayes filter that works on the virt...
Lab 13: Path Planning and Execution
Now that we’ve successfully completed Labs 1-12, we are finally at the point where we want to d...